

Assembling the Robot Dog
Reaching the flow state.
Last time, I wrote about getting stuck on Step 11 (setting up the Raspberry Pi OS). After troubleshooting, the issue was resolved and I continued with the assembly process.
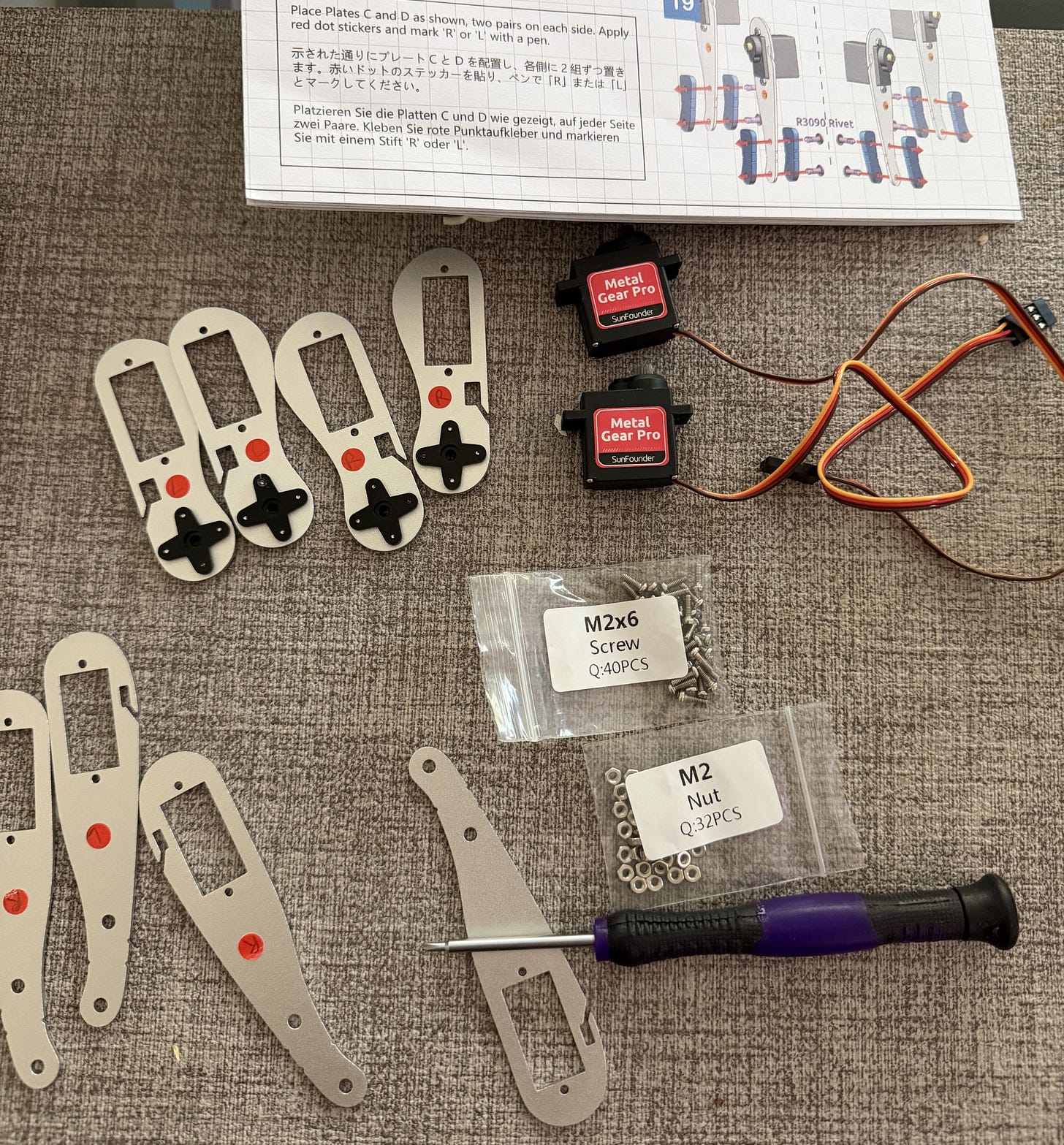
Image of the right and left legs with Metal Gear Pro servos, M2x6 screws, M2 nuts, and a screwdriver.
Over the past few days, I was working on setting up the legs, attaching the servos, screws, and components. The hardest part of this assembly was the screws. Some of the screws were tiny and took the most time ensuring they were tight enough without breaking the servo arms. The servo arms are the rubber pieces that protect the gears from scratching the metal plates while the robot is in motion.
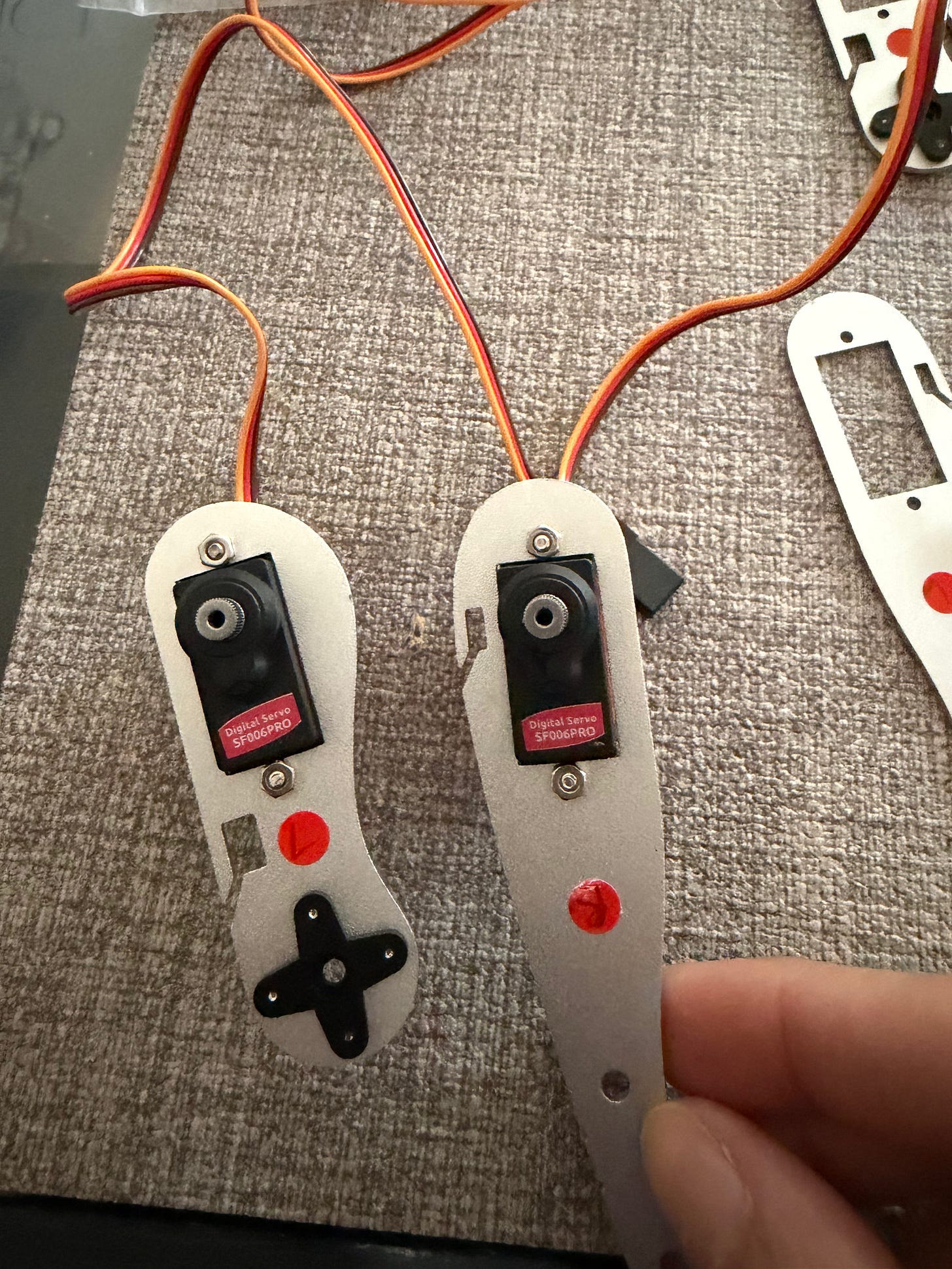
Image of the assembled legs with the Metal Gear Pro servos attached.
After attaching the servos to the leg and thigh parts of the robot dog, I attached the components to create two right legs and two left legs. The manual instructed that the legs must be positioned at a 90-degree angle, so I used a protractor to validate the leg position.
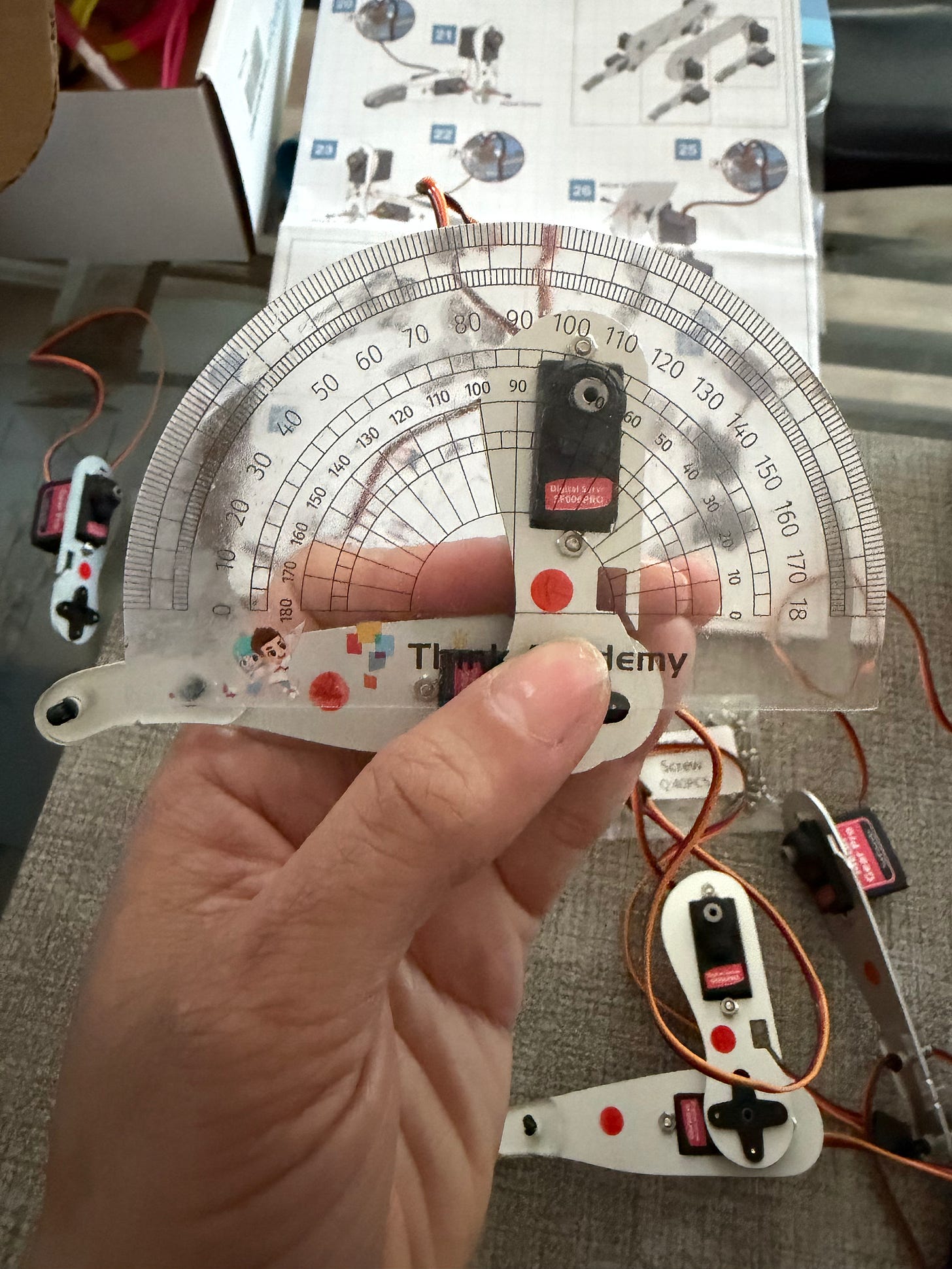
Image of a protractor held atop the assembled leg positioned at a 90-degree angle.
Now that I had all the legs positioned at a 90-degree angle, it was time for wire management! I threaded the wires carefully so that the robot dog wouldn’t trip over them or get stuck/unplugged while in motion.
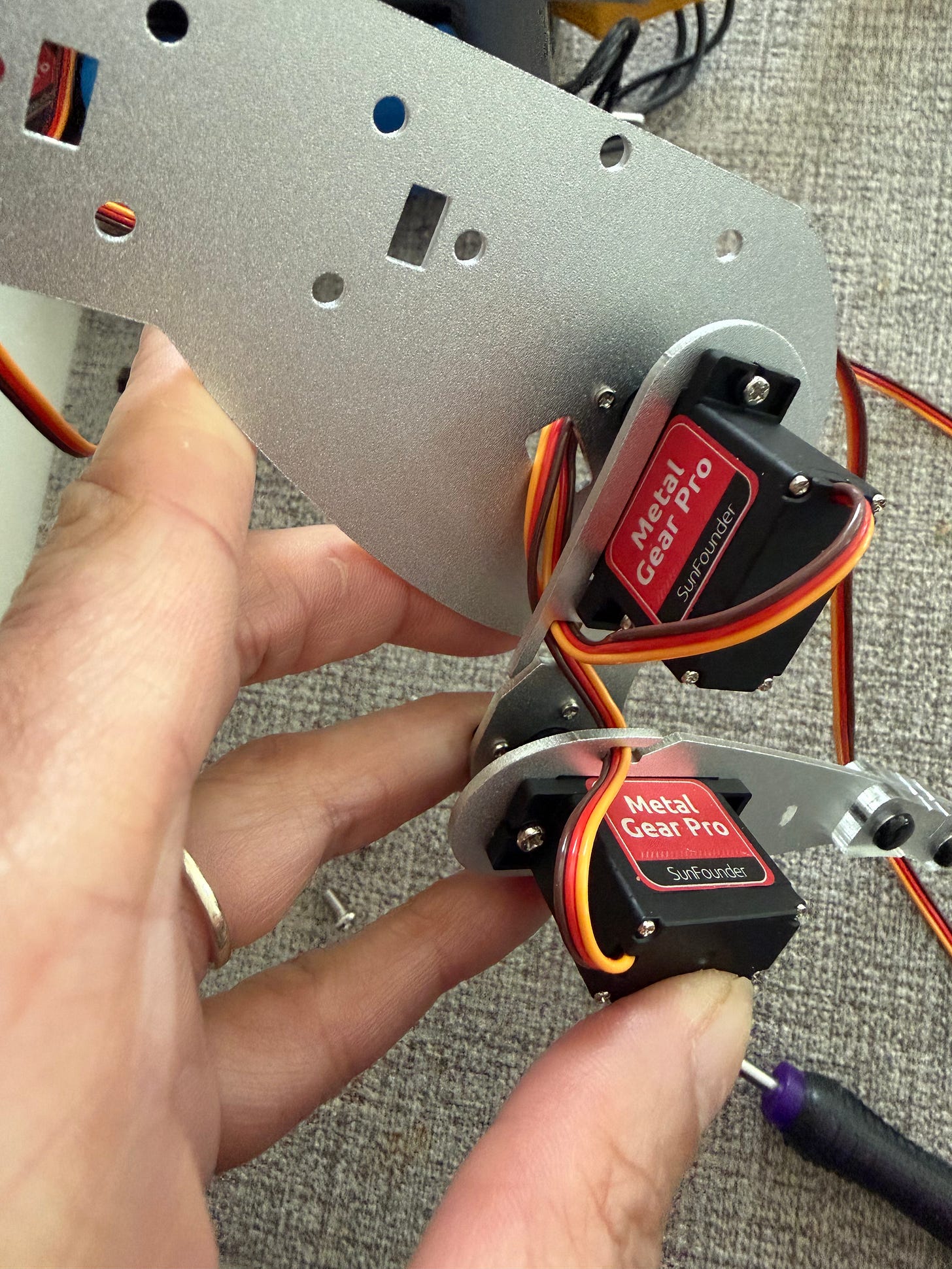
Closeup of the Metal Gear Pro servos’ wires threaded through the leg hooks.
It was a fairly easy process, and I even reached a flow state where I just followed the assembly instructions.
I took a break after assembling the legs and torso of the robot dog. To track my progress, I used GitHub and Jira which are tools that I extensively for work and don’t want to lose the knowledge.
